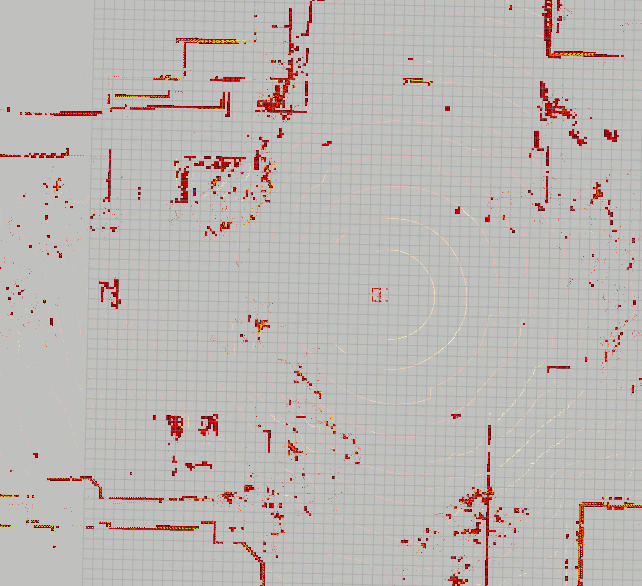
Here’s some recent code where I needed to create an occupancy grid map based on obstacles detected via LIDAR.
Last semester, my lab mates and I implemented a Extended Kalman Filter to smooth our GPS/IMU (INS) solution by adding a kinematic model of the vehicle. This was done for two different class projects, and the implementation took a few months. Some of the things we covered were measurement uncertainty, IMU bias & scale factor, and position drift.
Overall, we were able to demonstrate some smoothing of the INS solution, though we weren’t able to statistically prove whether we had improved the accuracy of the solution.
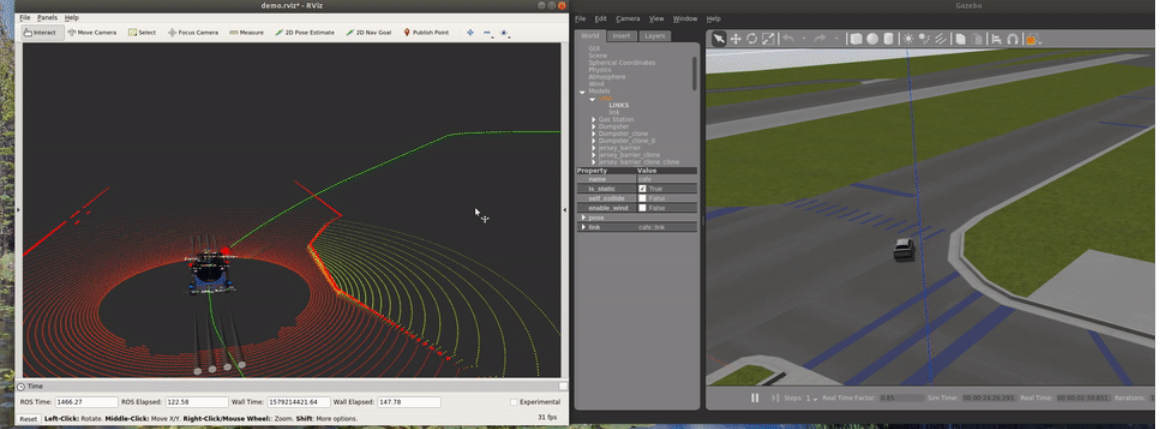
Here’s a cool simulation to do basic waypoint following using a PurePursuit algortihm in Gazebo and ROS.