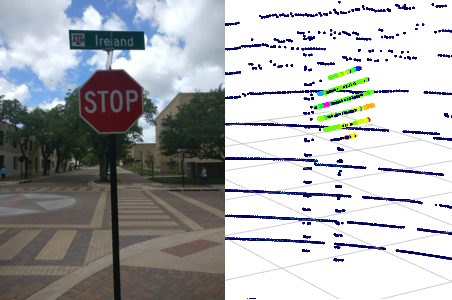
In one of my first undergraduate projects, I created a sign detection package for ROS-kinetic to detect stop-signs from a Velodyne VLP-16 LIDAR. There’s been some interest, so I’ve decided to post a basic write-up and the source code!
I was was a little confused on when to expect a “lateral” velocity in the vehicle body frame after analyzing some GPS speed data one day. I thought that the center of the vehicle shouldn’t have any lateral velocity unless the vehicle is slipping, which for a small and slow golfcart is reasonable to assume. But that’s not the case, and I’ll show a gif to prove it.
Running on 18.04 or Windows, and need to build code in ROS-kinetic? Here’s how you do it.